Policy Gradient
basic
每一个eposide记录为$\tau$
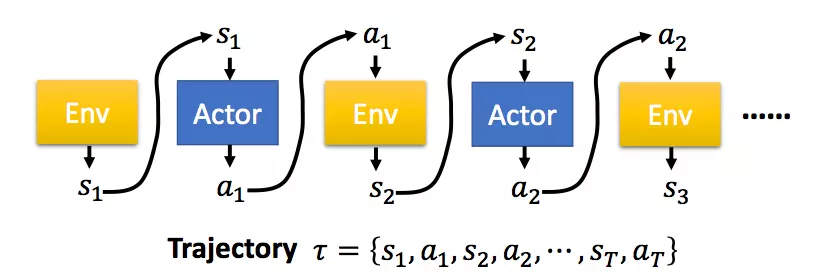
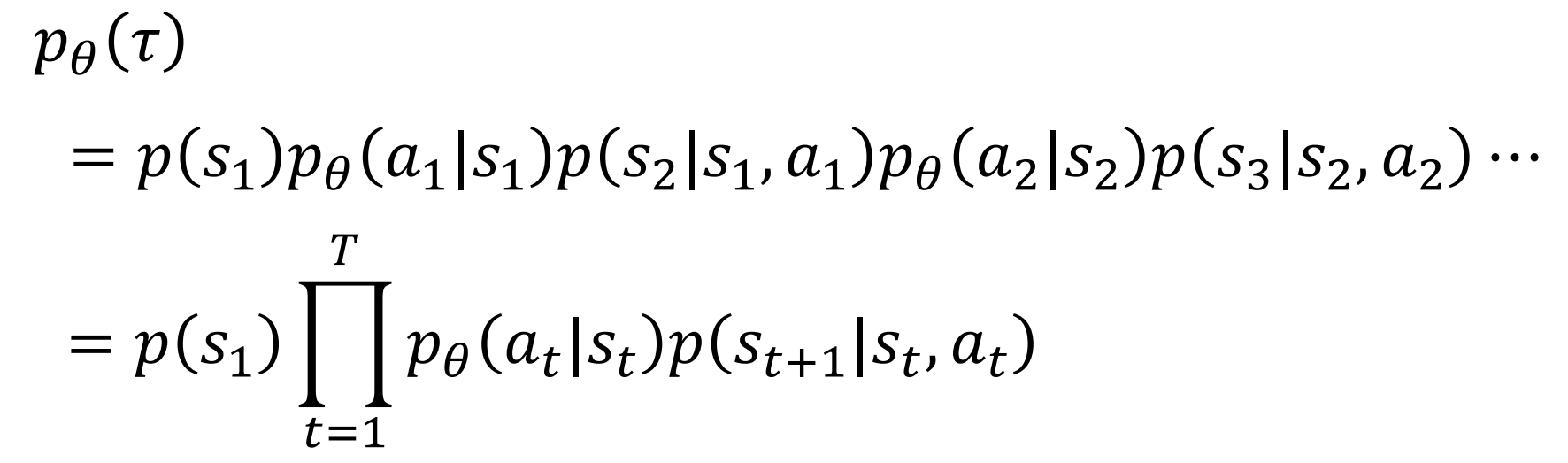
$p_\theta(\tau)$是按策略参数为$\theta$得到这样一个trajectory的概率
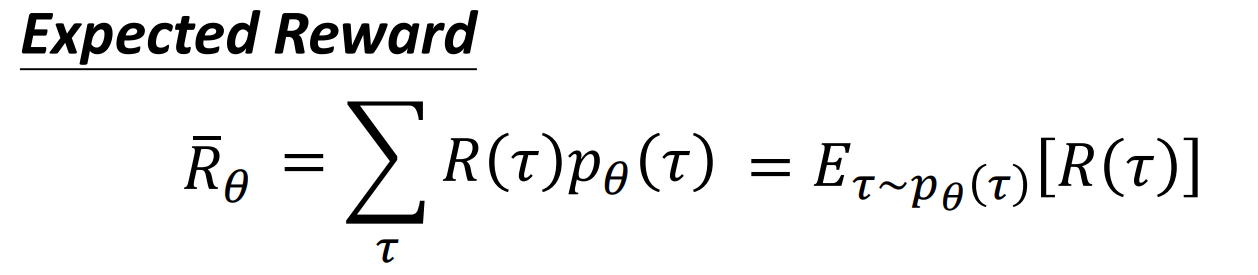
要提高这个期望,使用梯度上升,对$\theta$求梯度使用上式中的中间这个求和形式,使用技巧
这样可以转化为概率采样的形式,
最后一行中因为我们的梯度不关心$p(s_{t+1}|s_t,a_t)$所以直接忽略掉,$R(\tau^n)$应该放在积分号中间也可以。
我们可以看到这个梯度与$\theta$有关,所以每次更新梯度,都需要重新采样N次,也就是需要与环境交互,跑一个$\tau$出来,然后更新梯度,然后就需要重新再交互,这相当于是on-policy,换成off-policy就是PPO。
进行ppo之前先有两个tips。
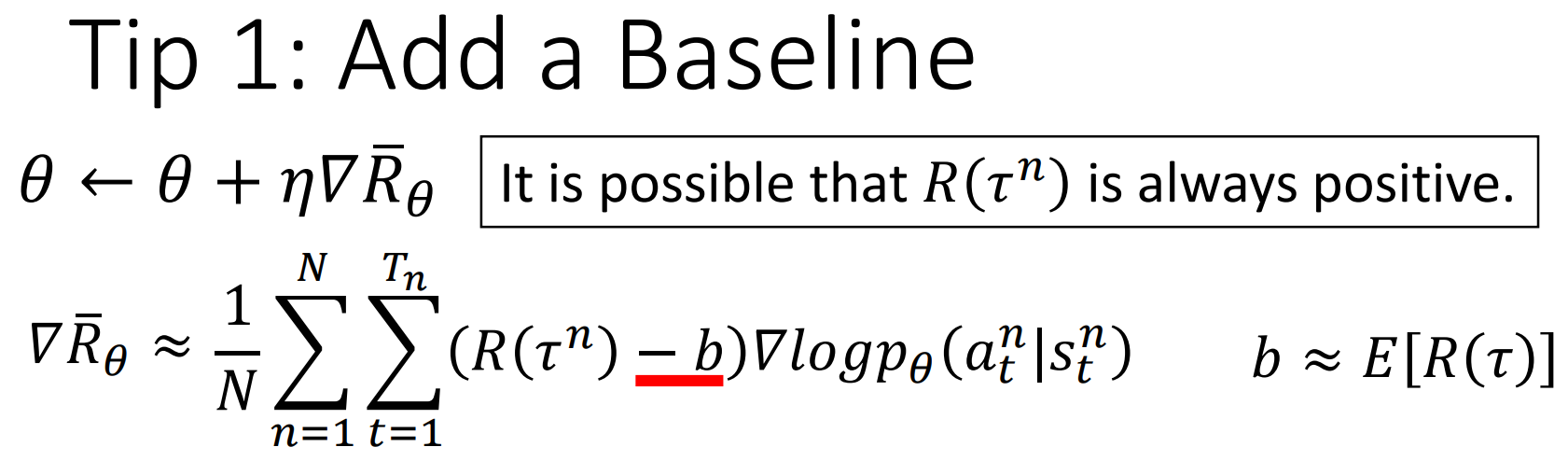
tip 1: add a base line
PG方法在更新策略时,基本思想就是增加reward大的动作出现的概率,减小reward小的策略出现的概率。假设现在有一种情况,我们的reward在无论何时都是正的,对于没有采样到的动作,它的reward是0。因此,如果一个比较好的动作没有被采样到,而采样到的不好的动作得到了一个比较小的正reward,那么没有被采样到的好动作的出现概率会越来越小,这显然是不合适的,因此我们需要增加一个奖励的基线,让reward有正有负。 增加的基线是所获得奖励的平均值b。
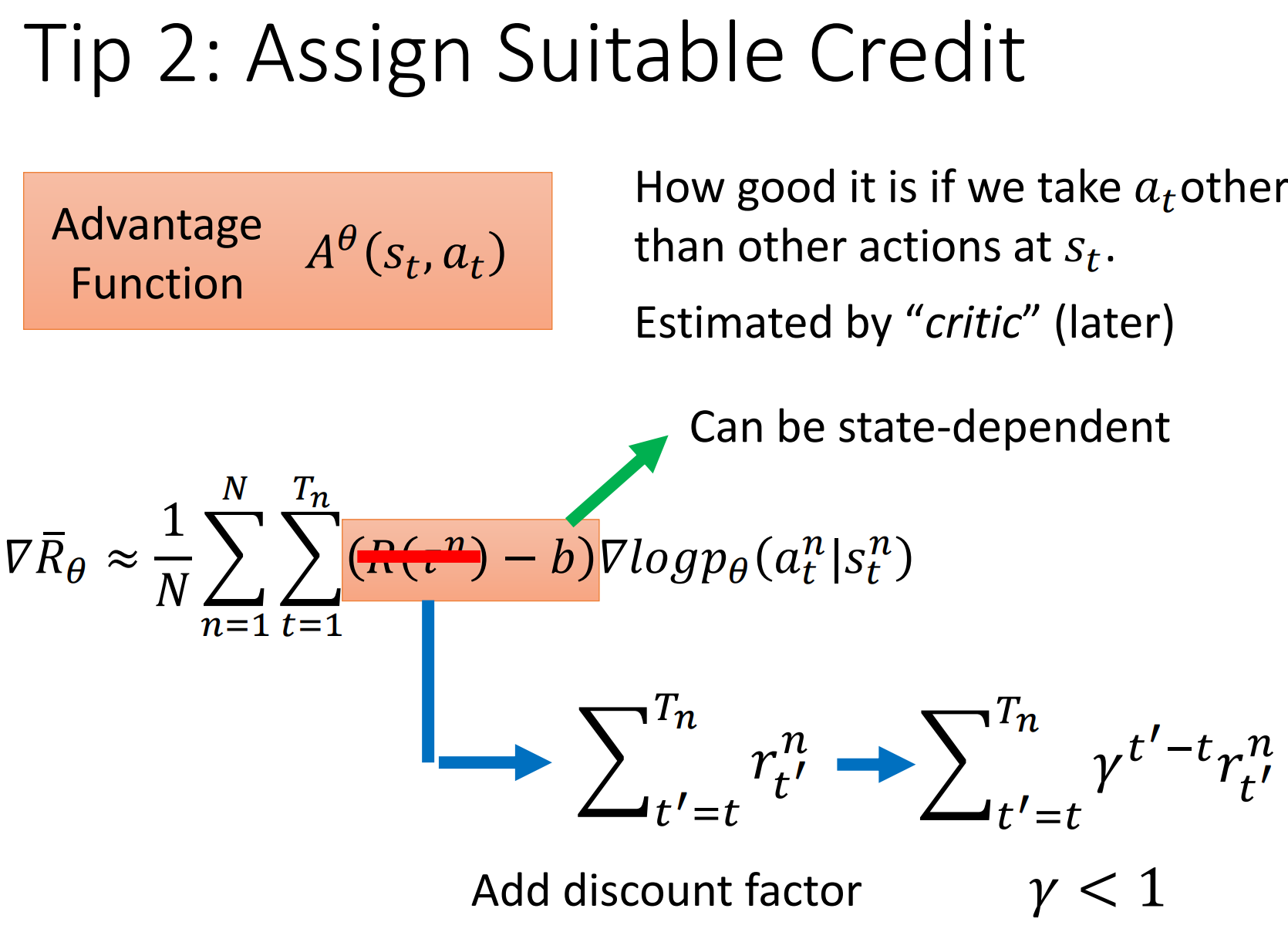
tip 2: Assign Suitable Credit
当前动作之后获得的奖励才重要
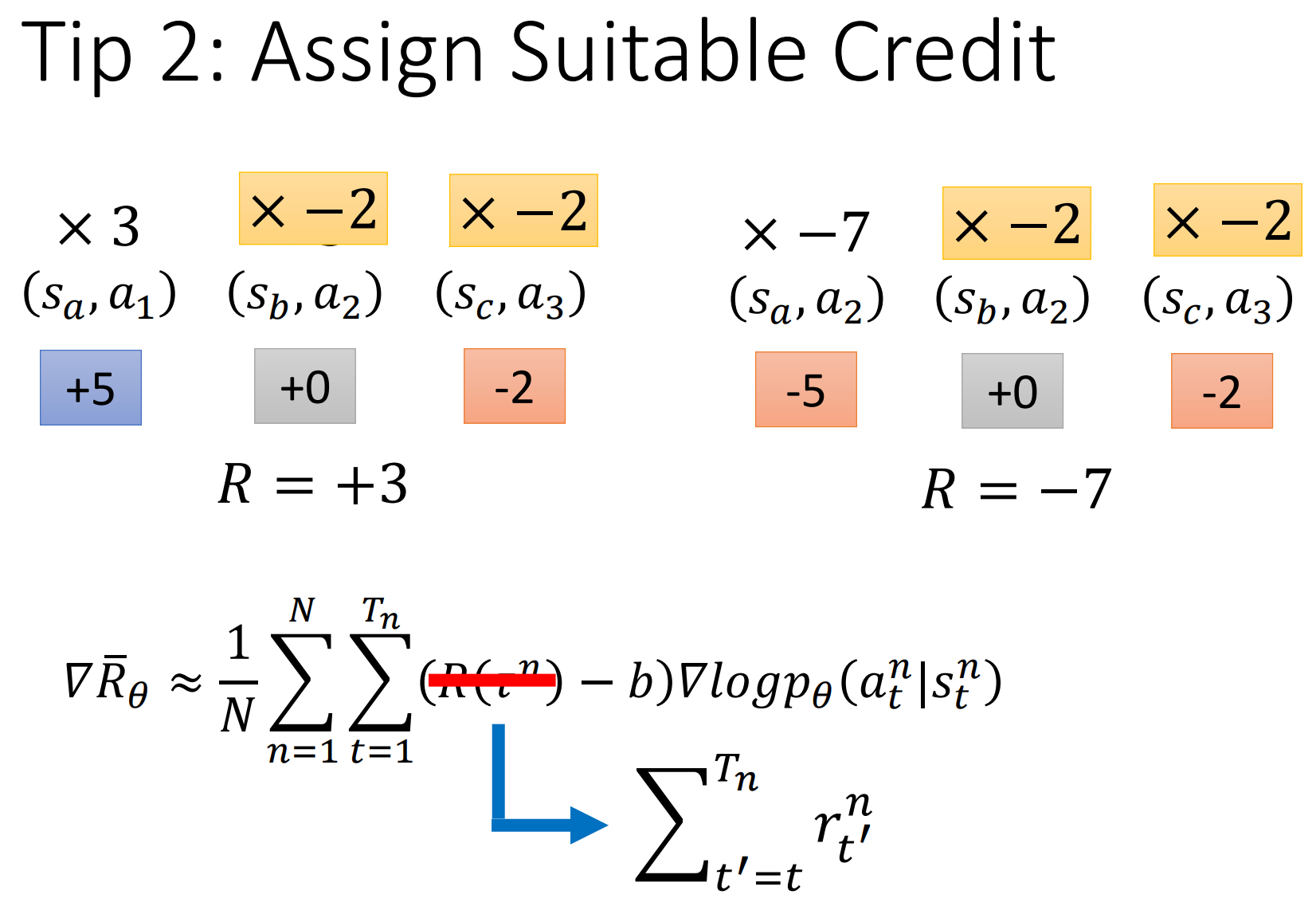
添加一个discount,前面那个系数可以用Advantage Function表示:$A^\theta(s_t,a_t)$
这个相当于在时间t之后得到的价值总和(忘了专业名词叫啥了)
Proximal Policy Optimization
采用重要性采样

可以从p的分布采样,换到从q的分布采样,需要注意,p和q的分布差异不能太大,因为虽然上式的均值相同,但是方差不同,还是会有影响。

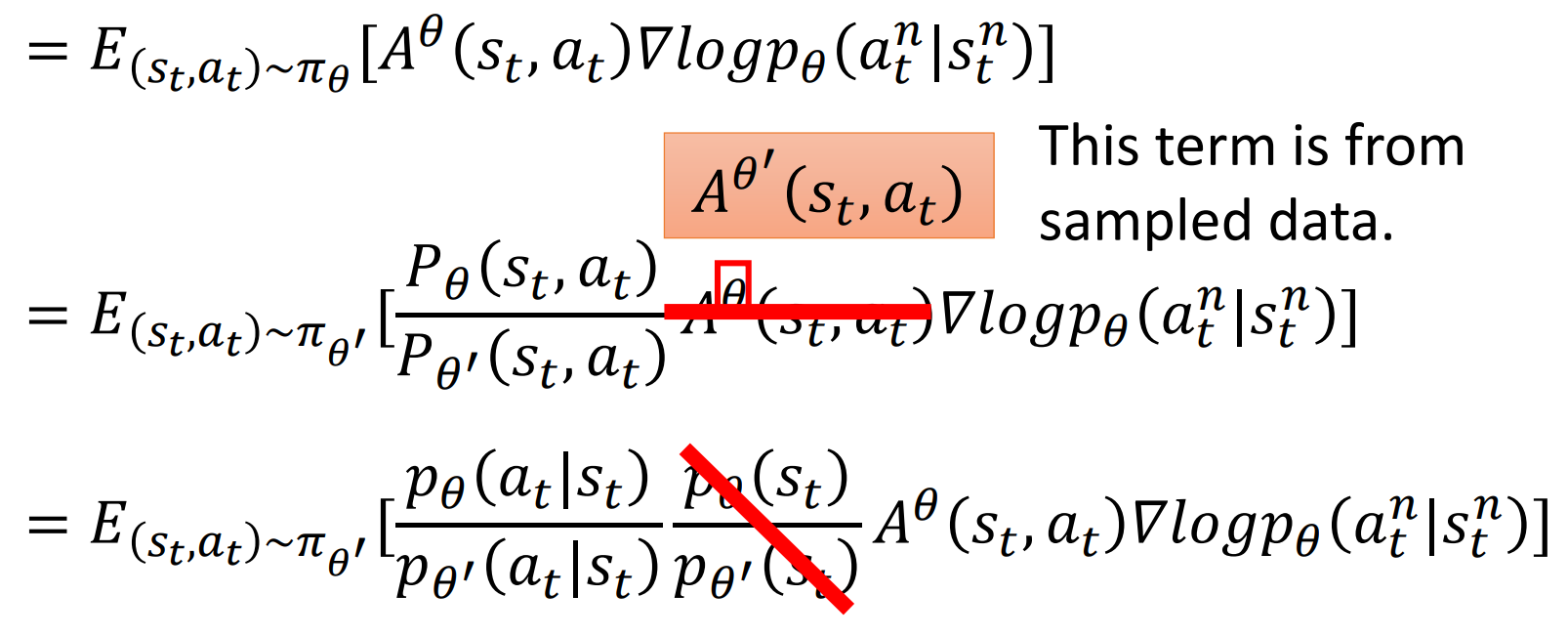
这里为什么是从$\pi_\theta$中sample出$(s_t,a_t)$怪不清楚的,现在的理解是
我们需要控制$\theta$和$\theta’$相似,使用KL divergence,这里肯定比较的是$p\theta(\bullet|s)$和$p{\theta’}(\bullet|s)$的距离


算法流程:
- Initial policy parameters $\theta^0$
- In each iteration
- Using $\theta^k$ to interact with the environment to collect $s_t,a_t$ and compute advantage $A^{\theta^k}(s_t,a_t)$
- Find $\theta$ optimizeing $J^{\theta^k}(\theta)-\beta KL(\theta,\theta^k)$

上面这些 来自于李宏毅课程.pdf) 。
有几点没有懂
- 新的策略需要凑一条条完整的流程$\tau$吗
- advantage function 应该怎么计算
- 为什么要优化函数J
更正:
重新看了下课程,之前弄错了,$\theta’$才是与环境交互的:smile:
优化的J的原因是,$\bigtriangledown f(x) = f(x)\bigtriangledown \log{f(x)}$相当于原函数是f(x),也就是这里的J
在算kl divergence的时候,把所有sample到的$s_t$都算下两个model的输出的区别,这个好像还比较麻烦,具体怎么处理还不清楚
TRPO
简单写下PPO的前身,更麻烦的处理方式,TRPO讲KL divergence项作为一个constrain,不在optimize项里面。
PPO2
PPO2 提出了不用计算KL Divergence的方法
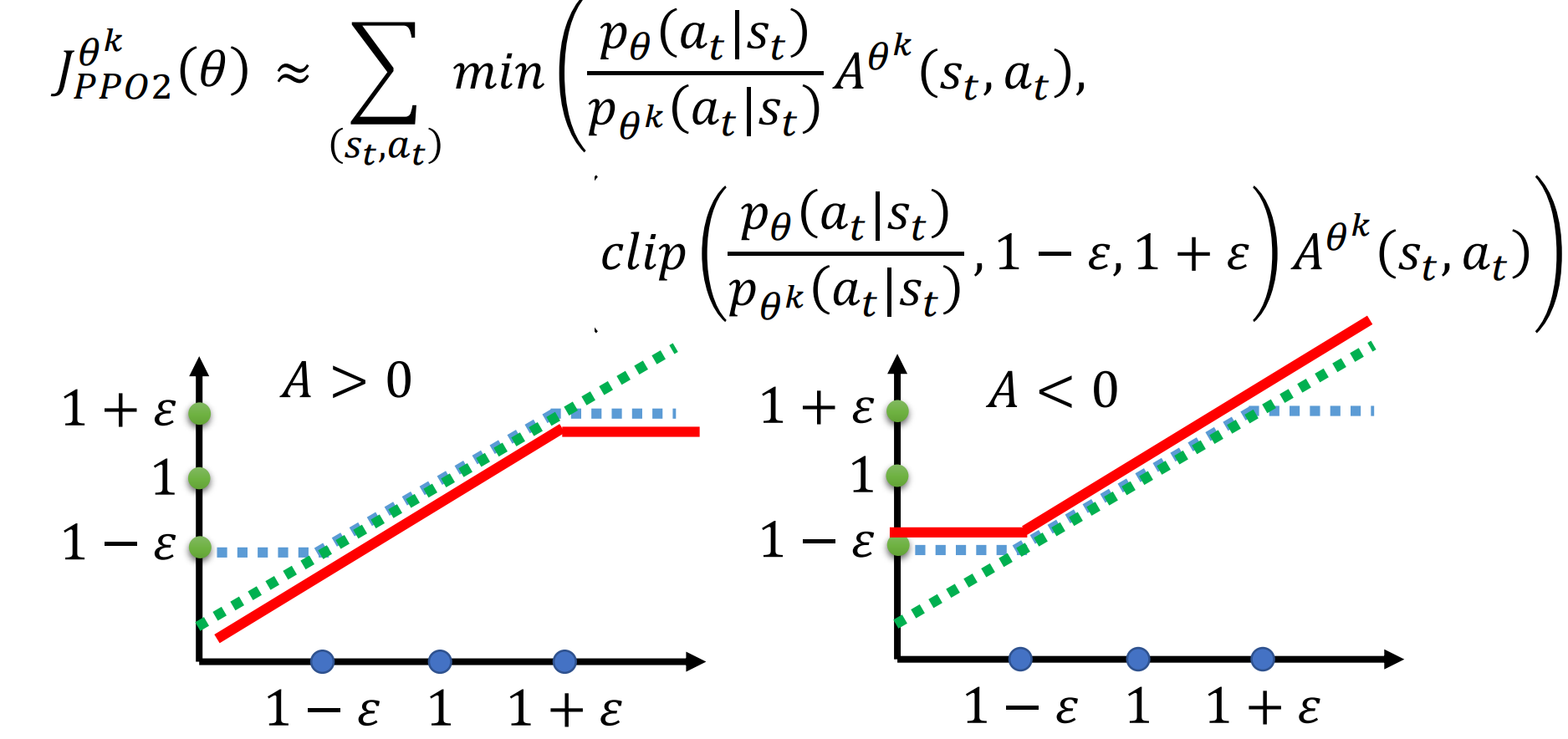
clip的意思是如果$p\theta$和$p{\theta’}$ 的比值如果小于$1-\varepsilon$则等于$1-\varepsilon$。
图中横轴是clip里的第一项纵轴是输出结果。
具体算法流程:
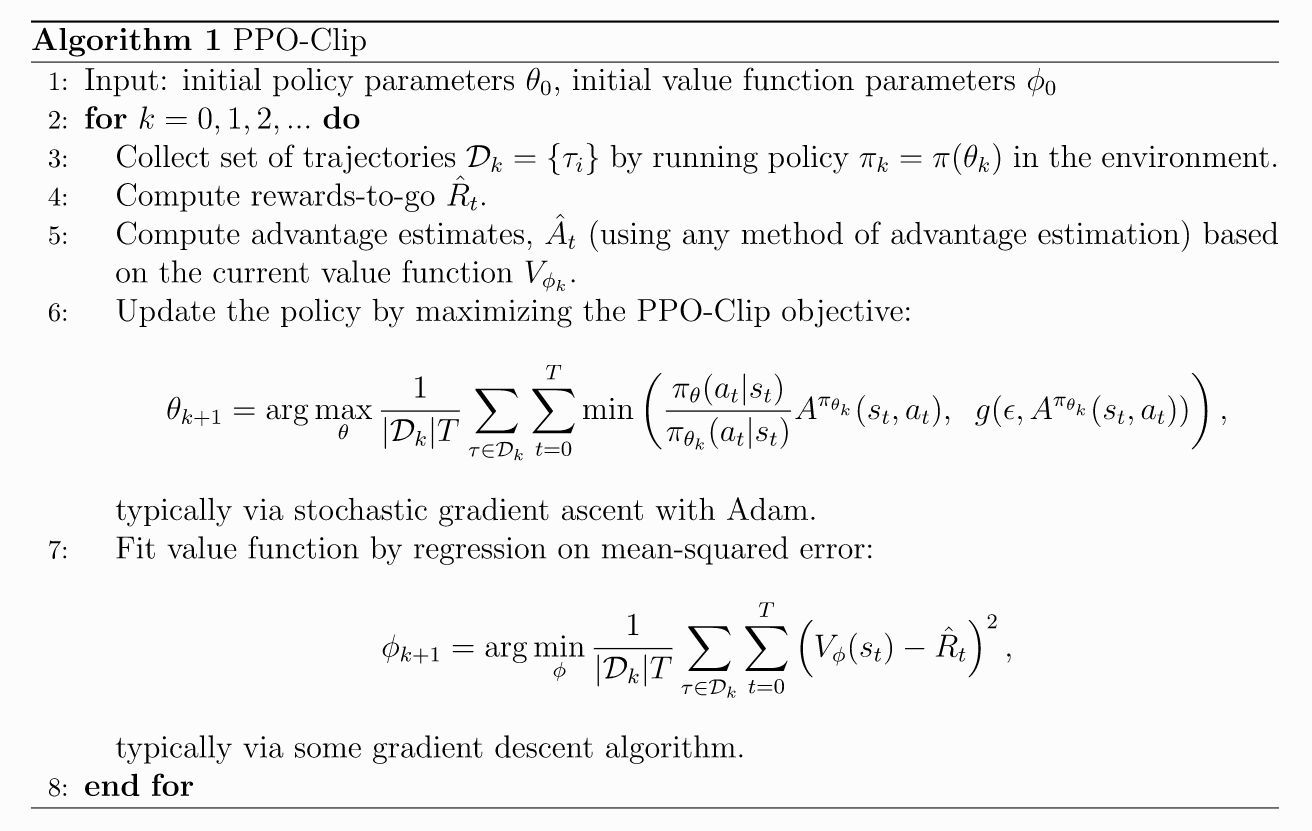
可以看到在训练过程中,是需要再学一个value function去估测advantage的。